Robotics Studio Project
Bolto is a 3D-printed quadrupedal robot designed to achieve fast and stable walking, drawing inspiration from animals such as a dog. The robot was developed as part of a studio course using a Raspberry Pi 4, 8 bus servo motors, and custom SolidWorks CAD. Bolto surpassed the required gait speed of 25 cm/s with a final walking speed of 33 cm/s.
Design Constraints
We were limited by the following requirements:
- Maximum of 8 Servo Motors
- Construction Limited to 3D-Printed and Laser Cut Parts
- Robot Must Walk At Least 25 cm/s
Concept Development
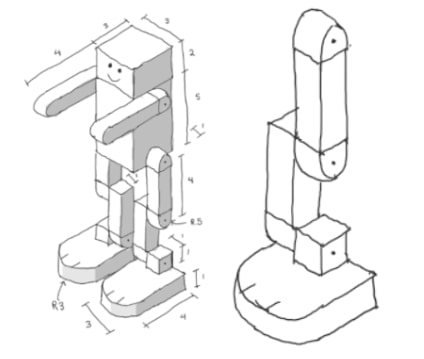
We explored three robot designs with unique kinematic and architectural features. Early sketching and system planning allowed us to rapidly iterate and evaluate feasibility before committing to a direction.
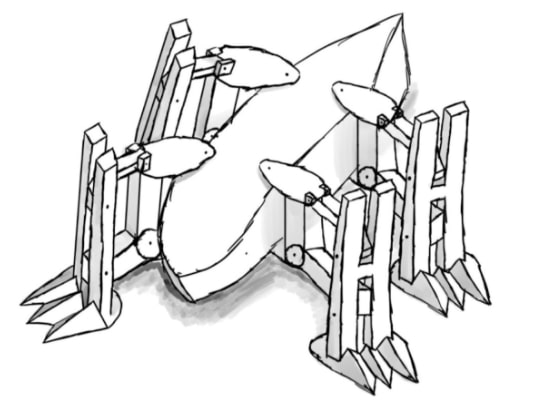
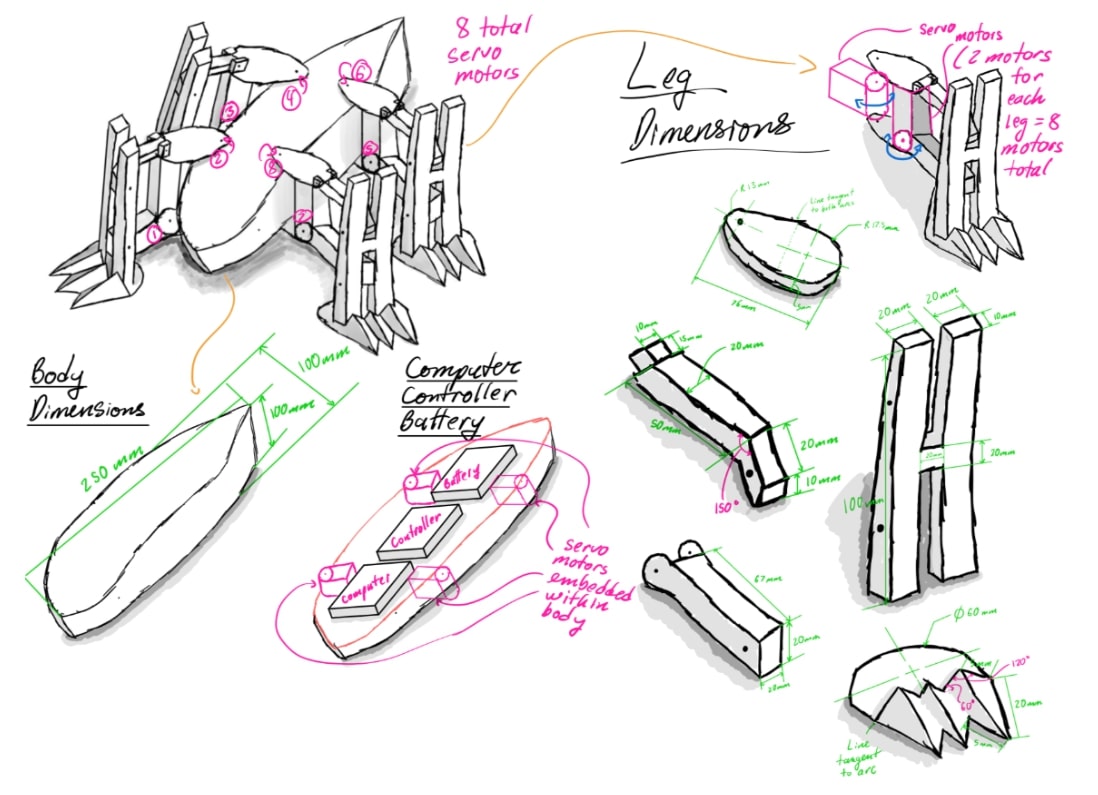
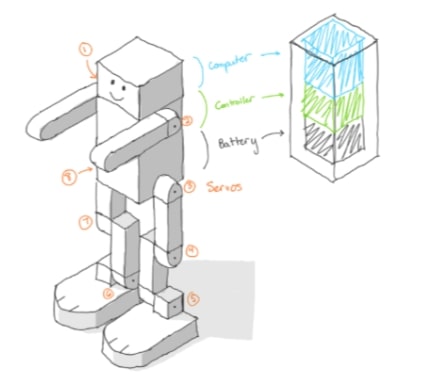
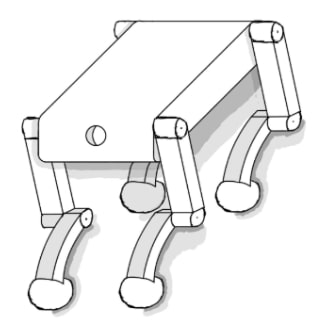
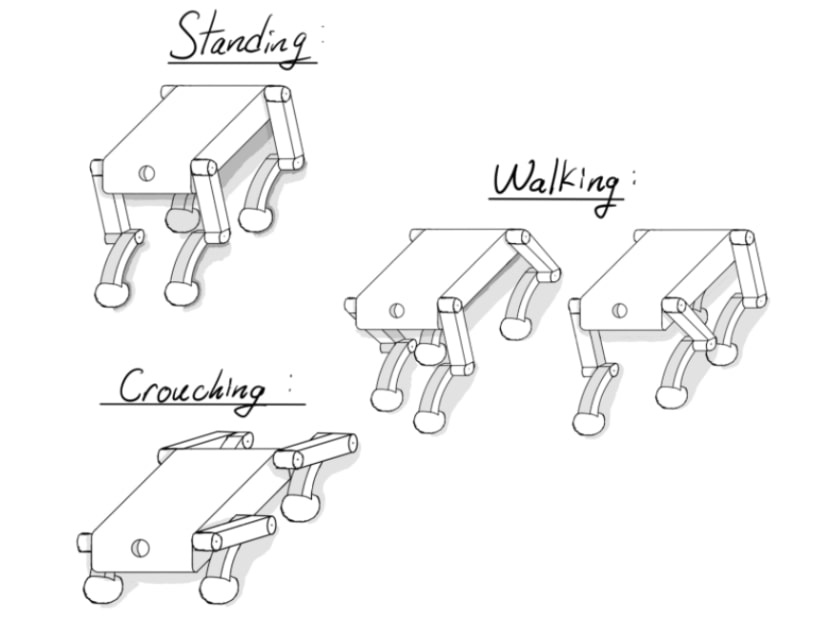
Ultimately, we selected Bolto due to its biomimetic inspiration, mechanical simplicity, and ease of motor coordination. With a center-mounted battery, lightweight limbs, and clean linkage design, it best met our performance goals.
CAD & Electronics
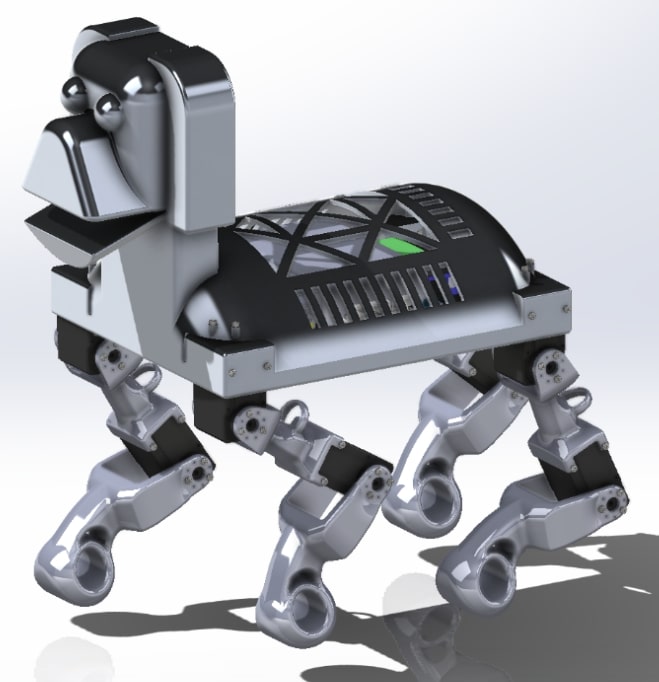
A full detailed CAD assembly was modeled in SolidWorks including all electro-mechanical components, wires and required hardware.
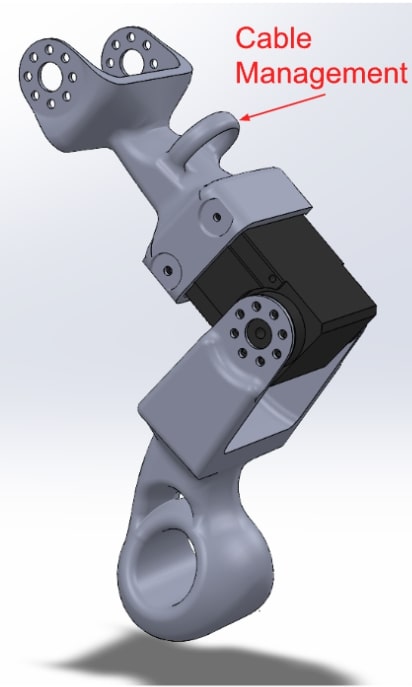
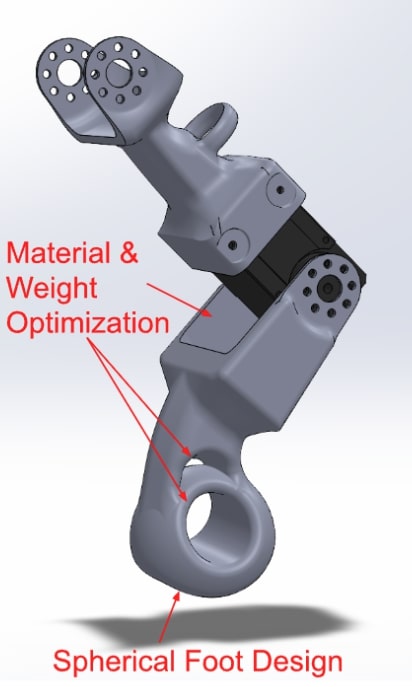
Leg Design
We focused on:
- Cable management through routed channels
- Material cutouts for weight reduction
- Spherical foot design for smooth ground interaction
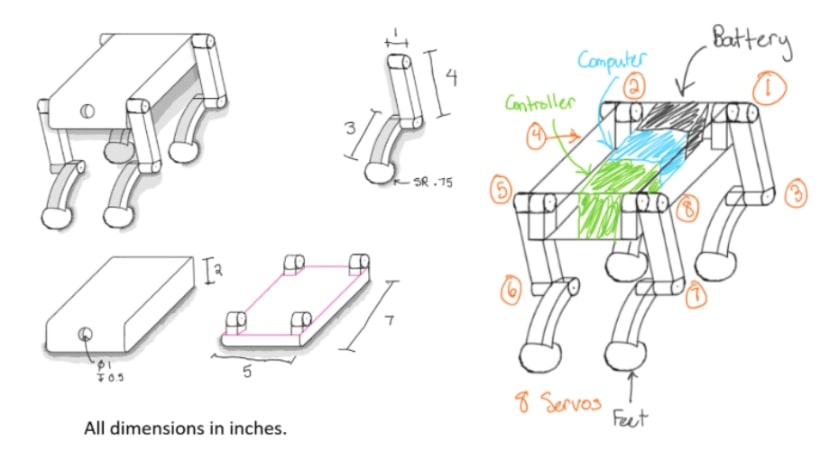
Electro-Mechanical Component Planning
The connections between electro-mechanical components were planned out ahead of time to inform their organized and efficient placement within the overall detailed CAD assembly.
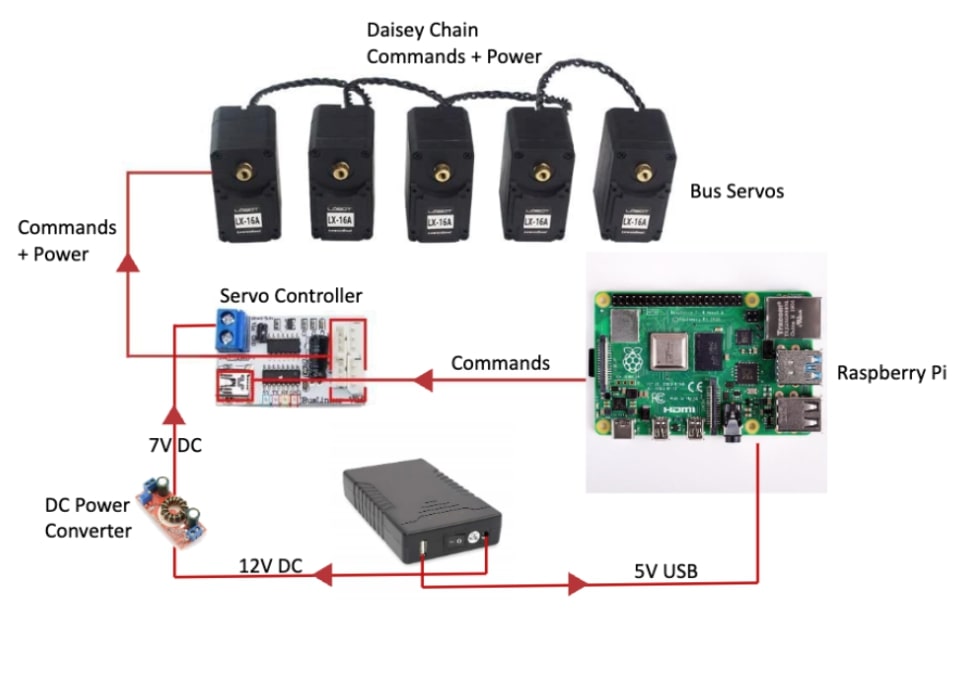
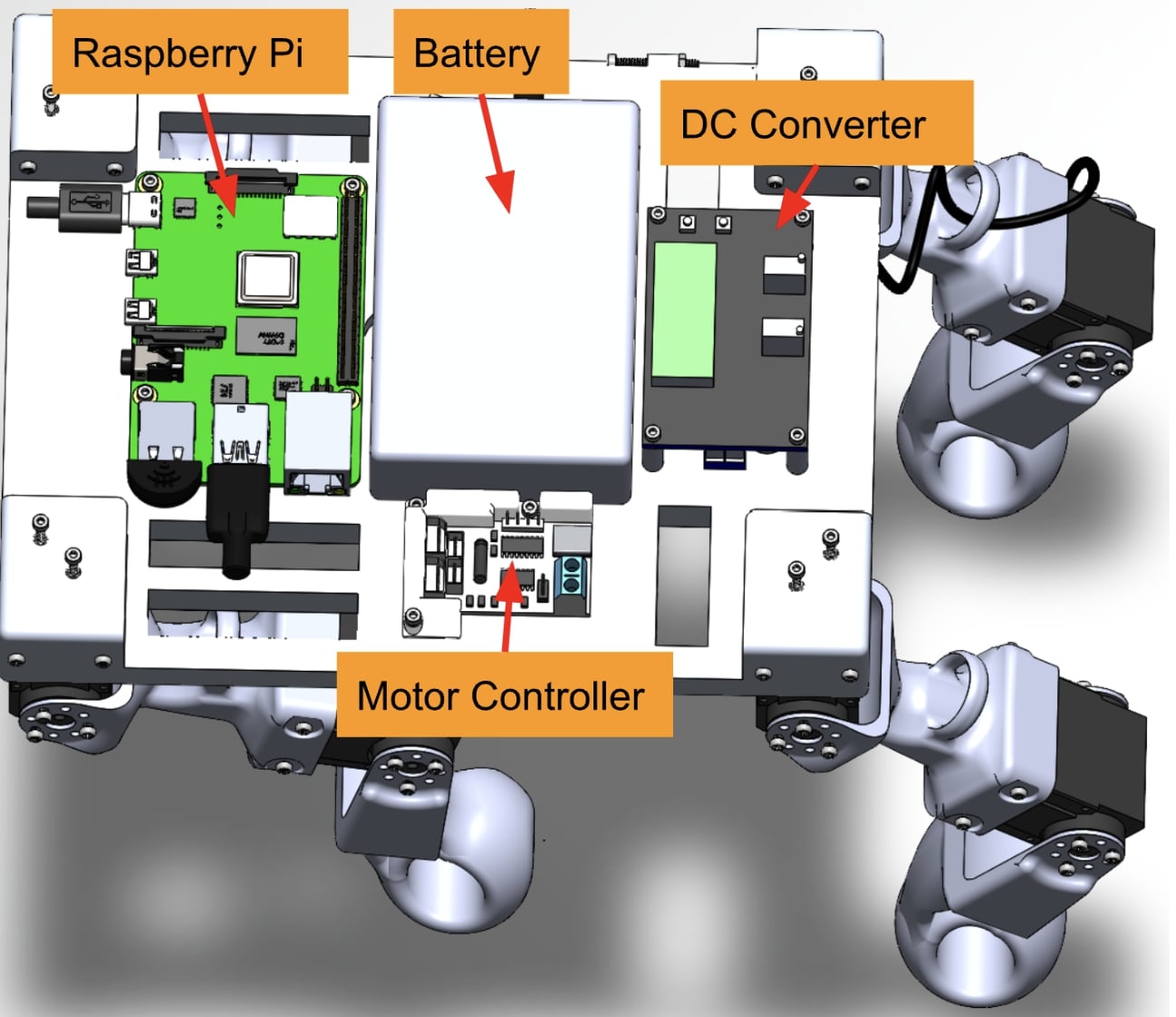
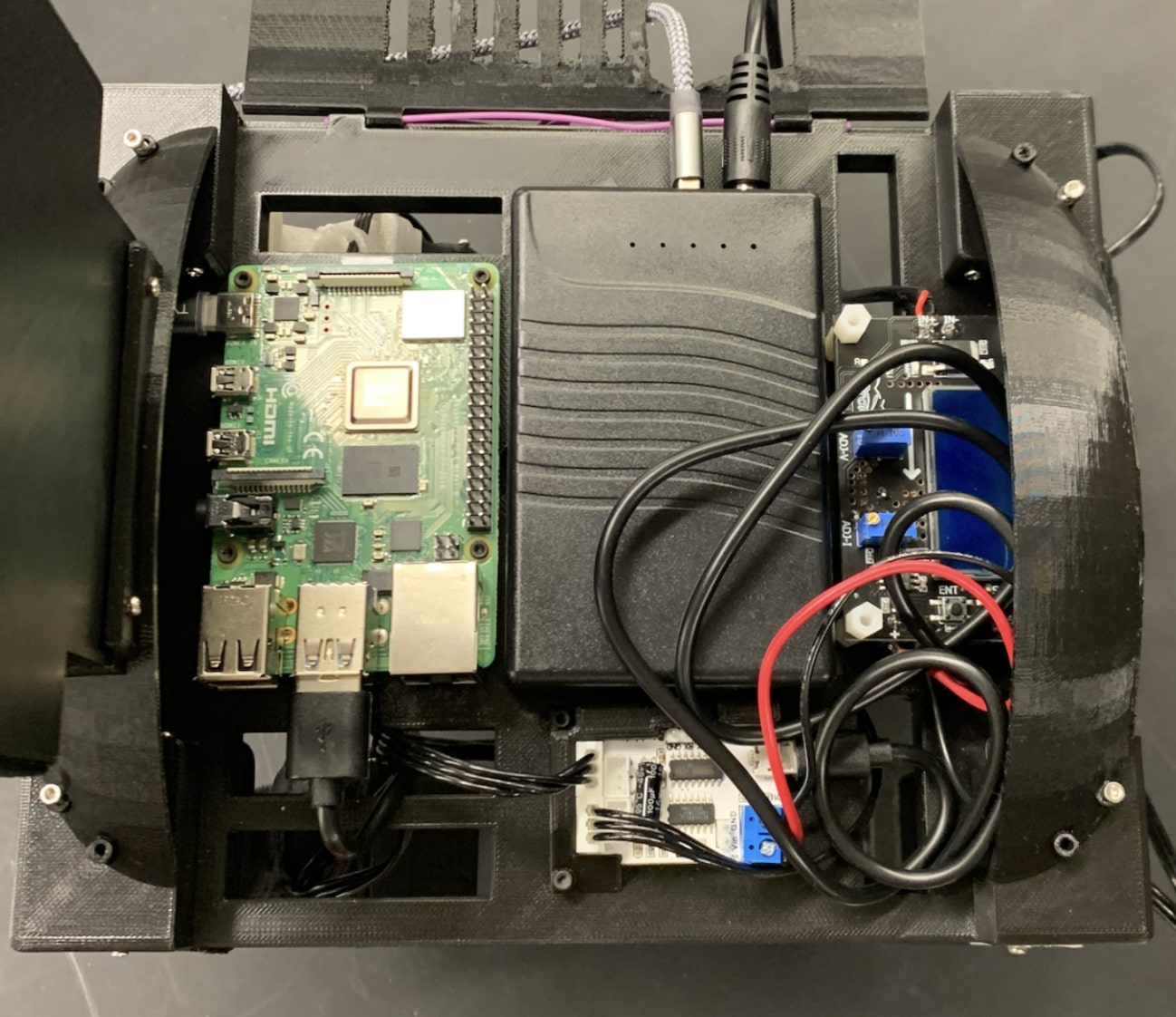
CAD planning was key to housing electronic components, achieving clean wire routing, and ensuring proper motor positioning. The electronics include a Raspberry Pi connected via a BusLinker servo controller and a custom power distribution system.
This informed the required tolerances and spacing for electro-mechanical components, wiring and plug-in adapters. This key planning allowed for streamlined assembly later in our production phase.
Detailed Component CAD Planning
Seamless Real Life Assembly
Programming & Testing
Initial leg testing was done in Python using sinusoidal motion patterns. Final code optimized these motions to achieve efficient walking. Simulation in PyBullet helped visualize gait dynamics, although some parameters were hand-tuned.
Bolto Fully Assembled

Seamless Real Life Assembly

Outcome
Bolto achieved a walking speed of 33 cm/s, exceeding the project's benchmark. The project emphasized rapid prototyping, detailed CAD design, embedded programming, and systems integration—all within a two-person team.
