MyHand-RLX
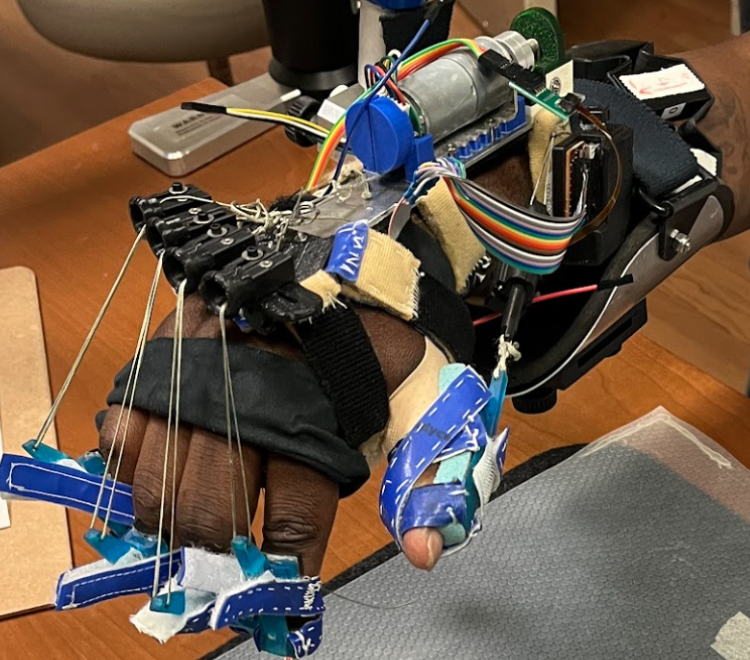
The MyHand-RLX incorporates small scale vibration motors into the MyHand Robot. Within the ROAM Lab at Columbia University, I developed a modular mounting system for the vibration motors centralizing and strengthening electrical connections. This decreased robot don and doff times during patient testing session and ensured connections were robust enough to endure testing procedures and transportation.
The MyHand Orthosis Robot
The MyHand Orthosis Robot is a stroke rehabilitative device which allows patients to regain the dextrous ability of their hands and fingers to grip and hold objects. The robot attaches to the users DIP and PIP segments and extends the fingers via a pulley system. The EMG arm band reads and interprets the microvolt signals of the arm via a machine learning algorithm to open and close the hand based on the patients' input.
Patient Usage
Stroke patients often experience high levels of spasticity in their hands where the muscles within the hand and arm become extremely stiff. This causes involuntary contraction leading to clenched fists, limited finger movement and overall impairment within their daily lives.
Incorporating Vibration
With their Touché Glove, the Stanford CHARM lab demonstrated that vibration pulses applied at random intervals and periods worked to provide patients with spasticity relief. In partnership with the CHARM lab, we worked to incorporate the glove's vibration motors and controller into the MyHand Orthosis Robot.

Stanford Touché Glove
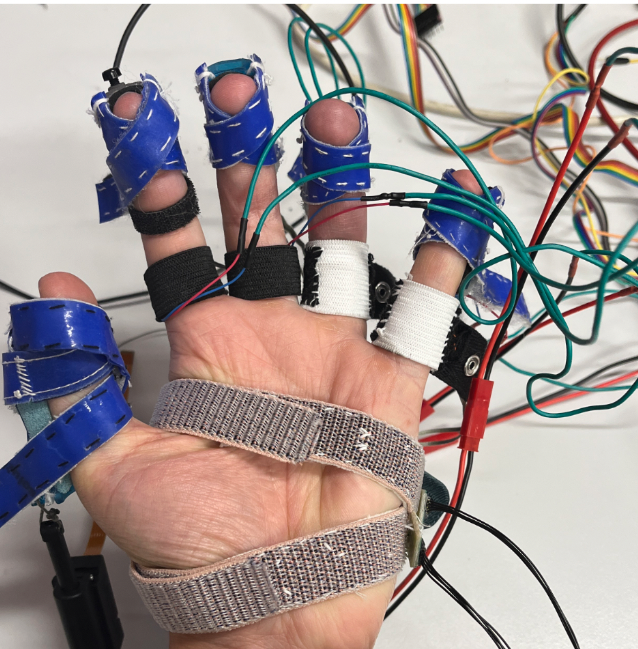
The original integration worked, but it was bulky and difficult to assemble onto the patient around the already donned MyHand Robot. Further when the MyHand Robot opened the patients' hand the palm and fingers consistently lost contact with the vibration motors. Note tha the Touché Glove was originally designed for and tested on patients with hands in a closed state rather than open.

Refining the Vibration Motor Integration
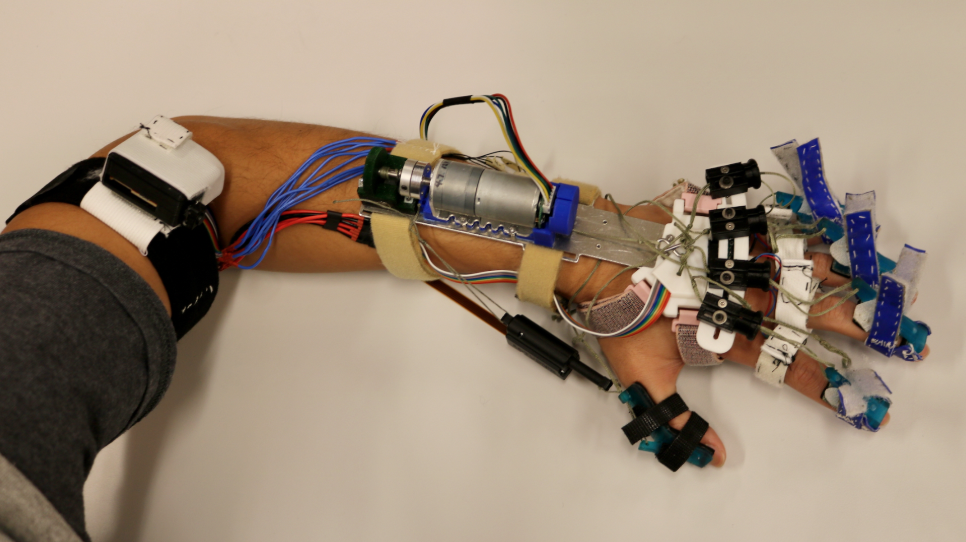
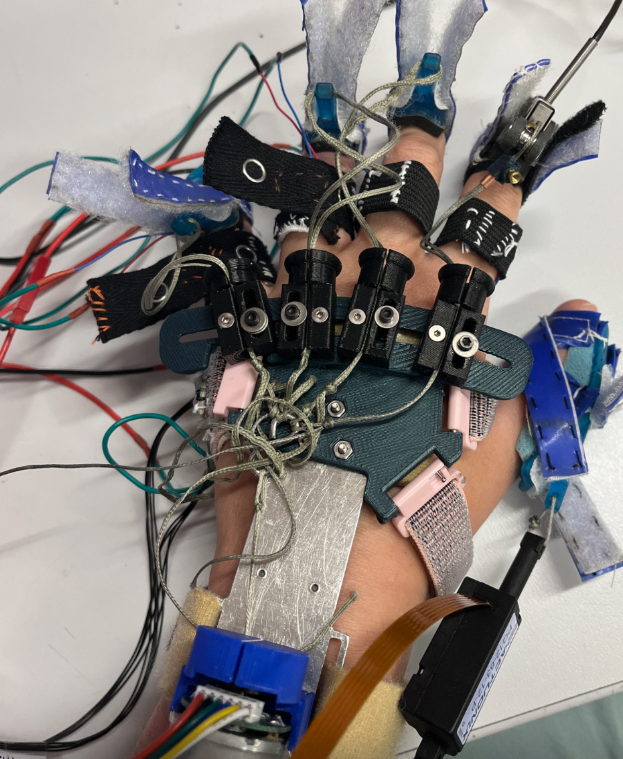
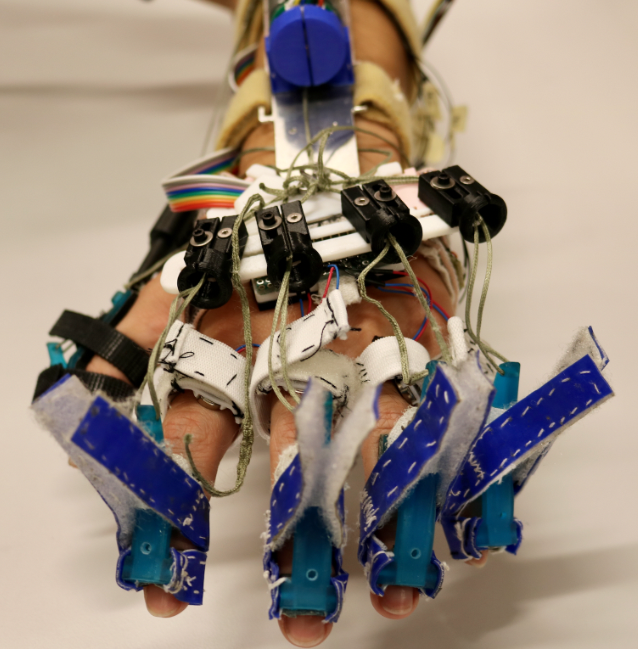
Version 2 worked to localize a single vibration motor to each finger, as well as, integrate the motors within the straps used to bind the robot to the patients' hand. This bypassed the need for the Touché Glove, decreasing the bulk and allowing for constant contact between the fingers and motors.
However, due to the messy and very long electrical connections, the vibration motors were prone to breaking during assembly, usage, and transport. The multitude of long wires made donning the robot onto the patients' hands extremely tedious and time-consuming which is an issue within the time constrained patient sessions. During the patient sessions, there is only a 15-minute window where the robot must be assembled onto the patient and calibrated. Failure to ready the robot within this time frame has been shown to negatively influence spasticity, skewing the data collected within the latter half of the study.
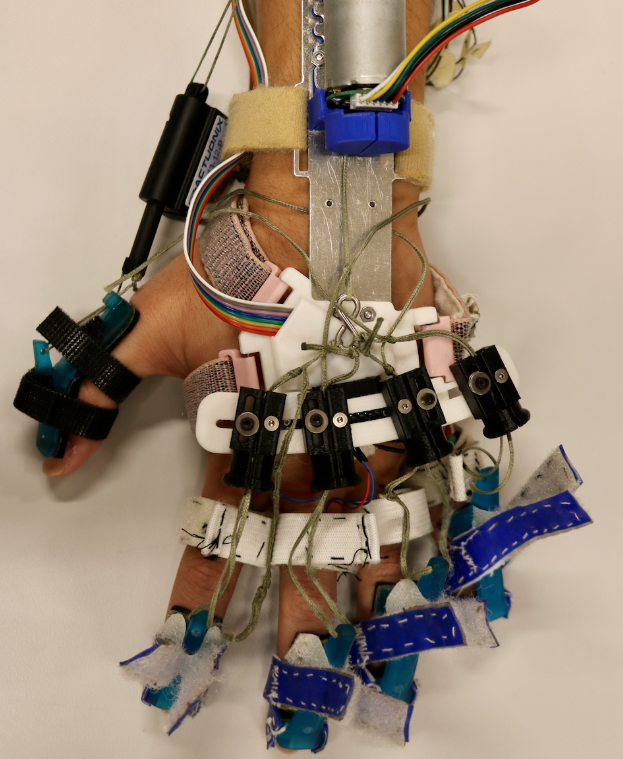
Therefore, there was a need for a reliable way to quickly insert and remove the vibration motors into and from the MyHand Orthosis Robot to decrease overall assembly time and the constant need for repairs. Version 3, titled the MyHand-RLX Orthosis Robot, addresses these issues with a modular vibration motor mounting system.
Version 2: Improved (But Messy) Integration
Version 3: Optimal Modular
Integration
Modular Vibration Motor Mount
Design Intent
To create a robust modular mounting system for the vibration motors, 3 new features were designed and implemented:
- A cartridge-like protoboard for easy insertion into and removal from robot assembly.
- The centralization of the vibration motor connections to a local hub.
- A new soft adjustable elastic band to mount the motors to the patient's fingers.
Cartridge-Like Protoboard
I devised a cartridge-like protoboard to allow for the seamless integration of the vibration motors within the overall robot. For this, I designed and constructed a custom protoboard with four 2-pin female connectors to which the vibration motors attach. The vibration motors now used a more compact and direct connection method. This key update enabled shorted more direct wiring, more secure and easily accessible connections, and it shifted the point of failure - if the wires are snagged, the motors simply detach from the connector instead of placing stress on or bending the wires.
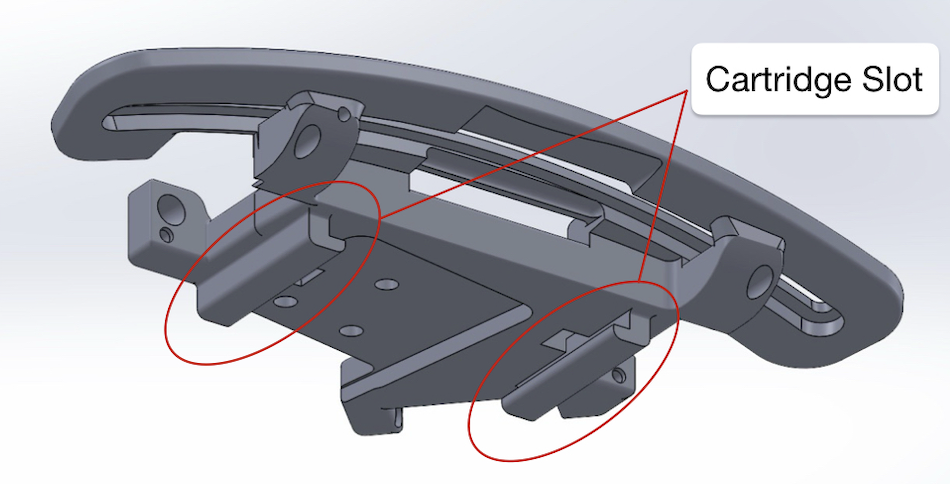
The hand splint CAD was modified to feature a slot for the cartridge on the bottom surface. The cartridge, to which the protoboard mounts, was designed in SolidWorks and FDM printed. It features the cartridge insert, which is accepted by the corresponding slot of the hand splint, M2 mounting slots to secure the protoboard, and a cutout for the soldered connections underneath the board.
Hand Splint CAD
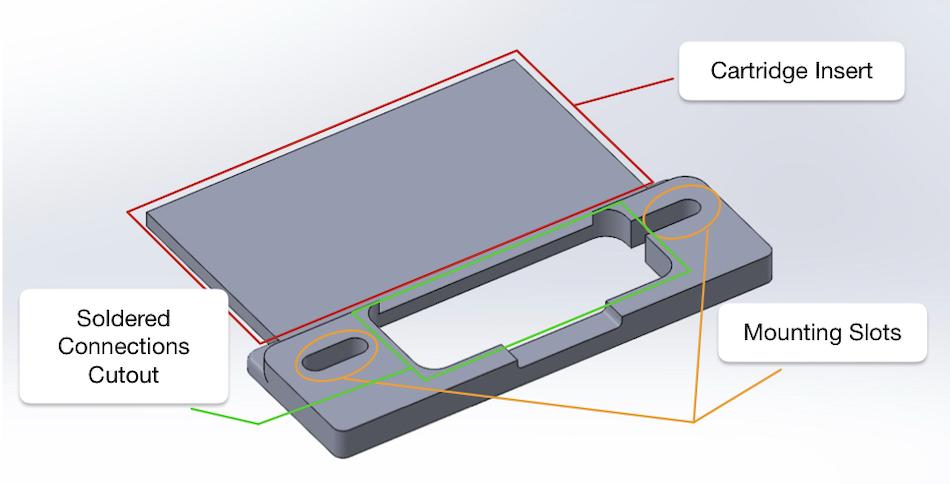
Cartridge CAD
Local Connection Hub
A centralized local hub was implemented to organize and streamline connections between the vibration motors and their controller. The wiring from the controller was organized and strengthened with ribbon cable and soldered to an 8 pin female connector which is designed to receive the corresponding male connector pins within the cartridge-like protoboard. The mounting shield is used to easily insert the female connector into the hand splint. It simply snaps into place within the hand splint via custom snap fit hooks.
The vibration motor controller was also mounted to the patient's upper arm via a custom-made adjustable elastic band. This decreased the bulk and clutter around the main components of the robot, resulting in a better patient/user experience.
Adjustable Elastic Vibration Motor Bands
The old bands which mounted the vibration motors to the finger featured a lack of adjustability and flexibility, resulting in prolonged assembly times. Closed loop elastic bands required the vibration motors to be assembled onto the patients' fingers before the rest of the robot and the snap buttons were extremely hard to fasten which contributed to an awkward and slow robot donning process. Lack of adaptation to different finger circumferences also resulted in loss of contact between the fingers and the vibration motors.

Old Elastic Band - Not Adjustable
Old Adjustable Band - Not Elastic
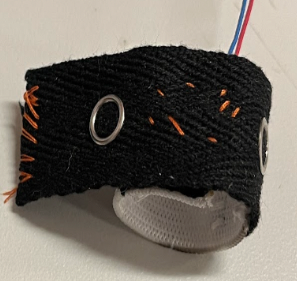
The new soft vibration motor finger mounts feature a stretchable elastic fabric and velcro for increased variable adjustability. The vibration finger mounts were now able to be assembled onto the patients' fingers simply, quickly and at any moment during the donning process. Additionally, the vibration motors could now be securely bound to the patients'' fingers ensuring constant contact. This enabled the robot to be used on a larger population of patients with varying finger circumferences.
